
|有序和无序场景的区分
目前,对于有序还是无序的定义?很多人并不太清晰,主要是大家对有序和无序的技术难度不够了解,其中,不乏以为只要用到3D视觉技术进行机器人抓取的,就叫无序抓取。其实,有序和无序对应的技术挑战是截然不同的。下面,我们通过例子介绍。
▲ 图1:有序的零部件抓取场景

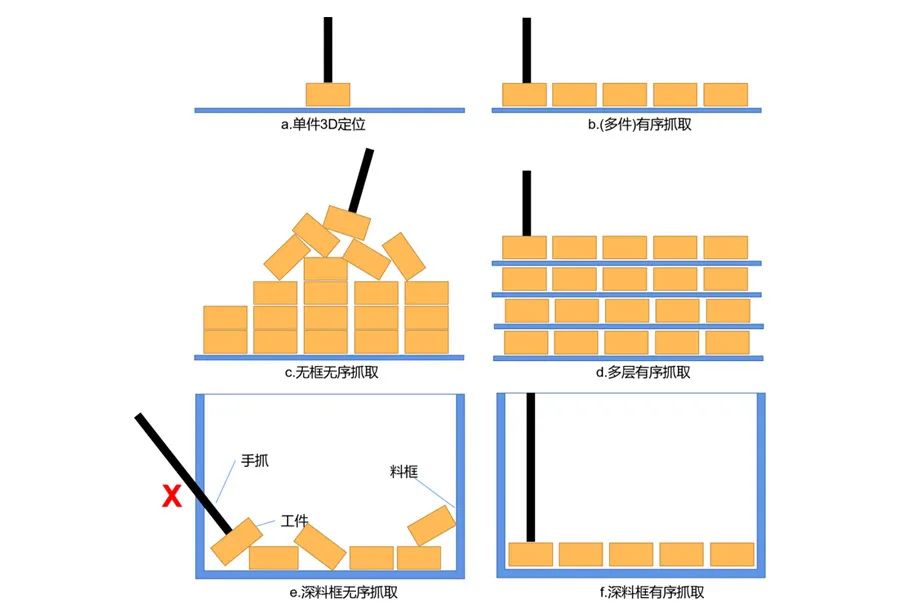
▲ 图3:无序VS有序
单件(a)vs多件(b):单目标识别和多目标识别,多件的难度大于单件,难度都一般;
有序(b)vs无序(c):无序场景中,抓取顺序复杂,难以用固定的排序方法稳定抓取,一般需要结合避碰确定抓取顺序,难度中等。
单层(b)vs多层(d):难度类似,对于多层,需要同步考虑工件识别和隔板识别,难度一般;
有框(e)vs无框(c):有框难度最大,对应的手抓抓取策略复杂,除了考虑基本的避碰要求,还需要结合算法设计专用的手抓和抓取规划算法完成整框抓取,清框率是总体技术水平的主要衡量标准;
有框有序(f)vs有框无序(e):一般需要将有框有序默认处理为有框无序,因为在框内抓取过程中,工件容易被扰动或者掉落,导致工件变成无序状态。
概括一下,无序分拣最直接的理解是抓取顺序不确定,没有固定的顺序,影响因素有工件的姿态、是否有料框等。有序分拣一般不需要避碰库做抓取可行性判断,手抓一般是直杆,识别位姿=抓取位姿。
无序分拣的抓取顺序大多数由避碰算法计算结果确定,无避碰则可抓,有避碰则不可抓;除了抓取顺序还要考虑抓取接近轨迹和退出轨迹,为减少在抓取接近和退出中出现避碰,一般手抓是带倾角的,1个识别位姿需要对应多个抓取位姿进行可抓判断。
无序分拣,由于技术挑战难度较高,称其为机器人操作领域的圣杯一点不为过。

